TaPRK
General
Projects
Shows
Excursions
Links
Yleistä
Ratoja
Projektit
Näyttelyt
Retket
Linkit
Parish/SRK
Tapiola Parish Model Railway ClubTurntable |
|---|
Masa rakensi "Truman", tai Tr2 "Russian decapod" veturin Pikon alustalle. Projektin valmistuttua hän oli valmis kokeilemaan Hv3-veyurin valmistusta kokonaan messingistä.
Minä [pekka] sanoin että tee ensin varikko vetureille. Tässä on selostus kääntölavan rakentamisesta.
Tämän sivun tekstit on kirjoitettu alunperin englanniksi, mutta sivun lopussa on suomenkielinen yhtenveto. Kuvat Opa, Antti, Olli ja Pekka
|
|
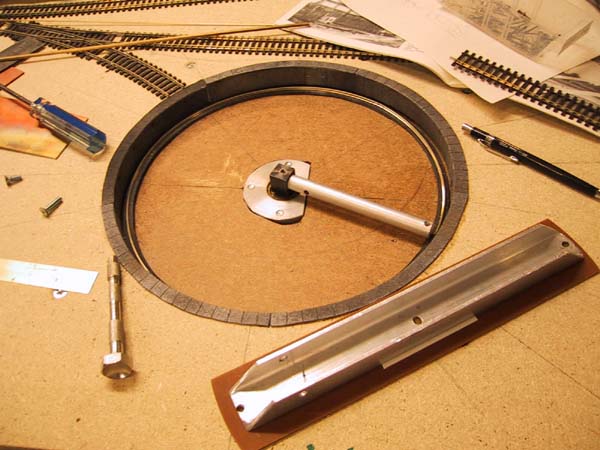
The mechanical construction of the table is a design of Mr Koskela: ex. 1/2 in. HP tape drive unit's tension arm assembly acts as the load bearing unit. The arm has two tapped holes drilled, and inverted U-channel aluminium profile is attached to it in order to form the solid base for the turntable bridge. The turntable pit is a separate plywood sheet and the bearing unit is attached to this. The plywood is then fixed to the layout base with long screws having nyloc nuts as stoppers and wing nuts for fixing. This way we can adjust the vertical plane of the turntable to match the layout. Ring rail is only cosmetic, but it will later act as feeder to the track on the bridge. The pit edges are fixed to the layout cover and the joint between pit bottom edge and plywood bottom of the pit is concealed befind ring rail base. The pit edge does not reach to the bottom to allow for adjustments. |

|
|
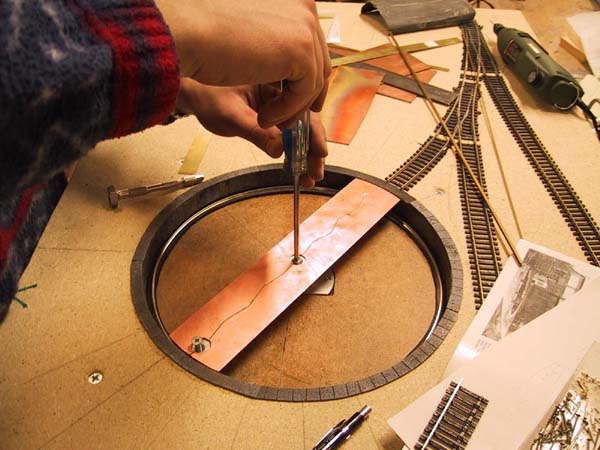
The bridge top is PCB, glued on top of the aluminium U-channel, and the rails are electrically separated with a jagged insulation made with a minidrill. The line is jagged to prevent bending. The superstructure is brass, soldered together and soldered to the PCB, and later insulated from one side. |







 Table.jpg Table.jpg
|
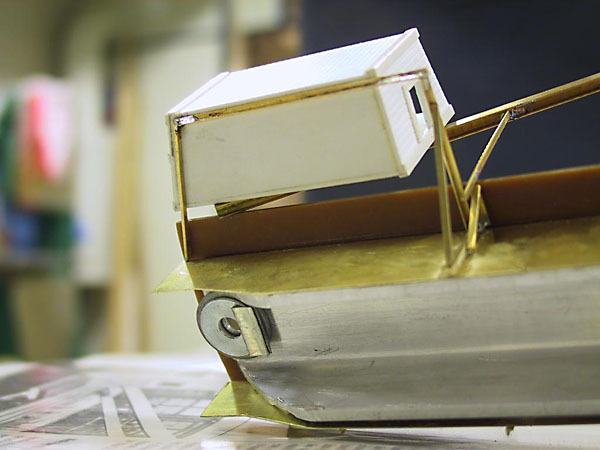
As the aluminium U-channel was not dead center (I drilled the holes!), the
cosmetic side members (brass) were packed to make the outside look symmetrical.
The details are glued on, except the cabin base, which is soldered together.
The cabin is made of scribed polystyrene. |


 ttmotor_1.jpg ttmotor_1.jpg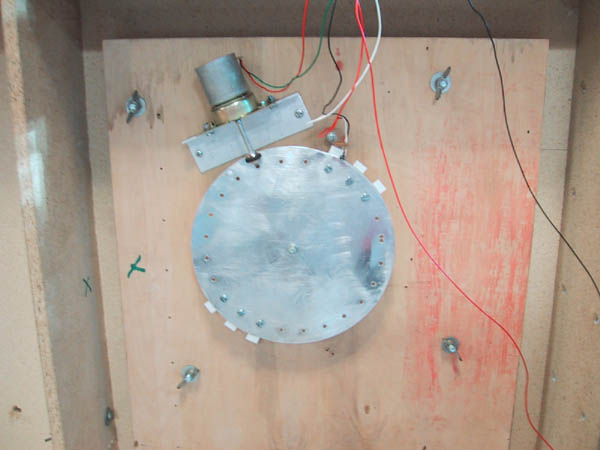 ttmotor_2.jpg ttmotor_2.jpg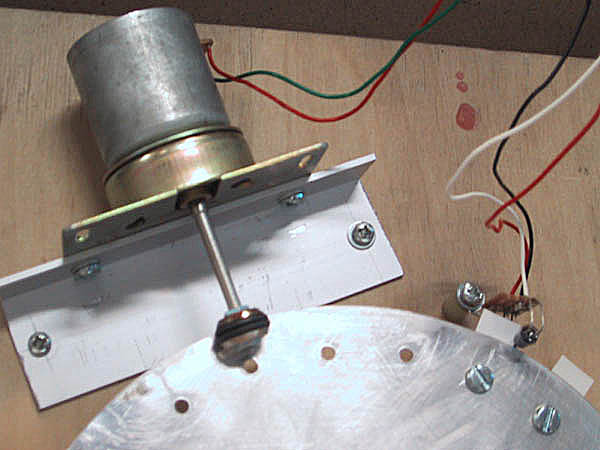 ttmotor_3.jpg ttmotor_3.jpg kpoyta.jpg kpoyta.jpg ttbottom.jpg ttbottom.jpg
|
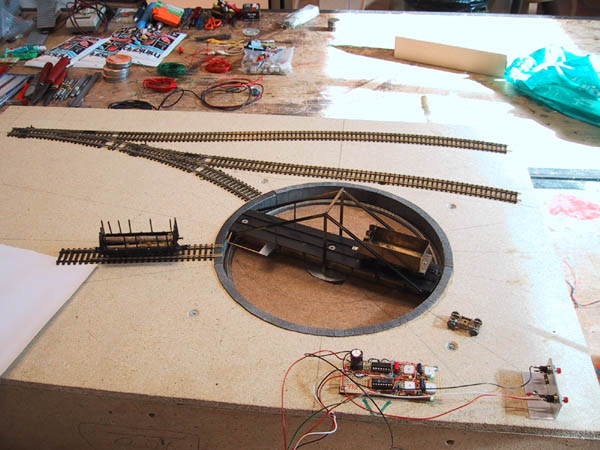
Below the baseboard we have a largish aluminium plate fitted to the axle (there was a screw conveniently at the axle centre). The aluminium plate has a friction drive system to operate the bridge. Microswitches will be fixed to turn the polarity of the bridge tracks (we aim to have the layout built with reliability in mind -- if we loose aux. power we can still run over the bridge and turn it manually as there will be no electronics in track polarity system). The bridge's electronic indexing was tested for the first time on Sunday 9th July 2001 The idea is based on Teton Line's turntable indexing, but we use only one opto-sensor pair and detect only the other edge of the "vane". 
Opto-sensors are usually used to detect if the beam of light is blocked or not. We instead search for the "gray area" in between. The system basically has a window discriminator where one op-amp detects if the beam is blocked, and the other if the beam is un-blocked. On both cases the amount of darkenss required is adustable, so that we also have a situation, where the beam is not blocked and not un-blocked. In this situation the table has reached the correct position. The other op-amp will drive the table clockwise and the other anti-clockwise. Additional electronics provide for slow acceleration of the table, so that whenever the correct position is found, the table will be almost instantly halted but it allways overshoots, so the electronics will slowly accelerate the table again towards the correct position. As the table is stopped from slower speed than before, the table will halt closer and closer to the correct spot and thus due to slow acceleration will not gain speed to pass the correct spot as fast and far as at the previous attempt the table will eventually (after approx. three trials) find the correct spot. 
I wished to separate the window position setting from the window size setting. On the right is a suggestion from Model Electronics Railway Group MERG to make the adjustment easier. The turntable was shown to public at the Helsinki Club's Xmas exhibition 2001. We added a pin to the aluminium plate that operated a microswitch that changed the track polarity of the table via a relay. The table also has a motorcycle dynamo carbon for current pickup from the ring rail, the other polarity comes via the axle. The positioning system worked well, it was fun to see the audience reactions when the table halted not quite correctly, but after a brief moment then shifted a bit to actually align the rails. The positioning system and pickup will be developed further. |
Surprisingly identical approach done long before ours -- I understand -- at MIT Model Railroad Club
Kääntölavan perusrakenteen on kehittänyt P. Koskela.
Koko lava perustuu HP:n vanhan nauhavarmistusaseman nauhan kiristyksensäätövarren laakerointiin. Kääntölavan "sieluna" on valettu möykky, jossa on kaksi kuulalaakeria ja akseli laakerien läpi, ja tähän akseliin on valmiina ollut poikkiorsi ja orren päässä on ollut tappi, jonka kautta nauha-aseman magneettinauha kulki. kun varsi liikkui se ohjasi avokelaisen nauha-aseman kelausmoottoreita. Tuo valettu möykky on kiinnitetty kääntölavan montun pohjana toimivaan 12mm vanerilevyyn, ja poikkivarren päästä on nyppäisty tappi pois ja tapin paikalla on M4 tai M5 kierteellä varustettu reikä. Pystyakselin päähän porattiin myös reikä ja sekin kierteytettiin.
Kääntölavan runkona toimii alassuin käännetty alumiininen U-palkki, johonka on tehty upotetut reijät joiden kautta U-palkki ruuvattiin pystyakselin päähän ja varren päähän. U-palkki passattiin messinkiliuskoilla kiilaten suoraksi, niin että kun U-palkin pyöräytti laakerien varassa ympäri 180 astetta oli palkin pää samassa korkeudessa.
Moduulissa oli lastukevykansi, johon leikattiin kuviosahalla aukko, ja kääntölavan montun pohjana toimiva 12mm vaneri asetettiin aukon kanssa samankeskisesti, ja nurkista porattiin reijät vanerin ja lastulevyn läpi. Vanerinen kääntölavan montun pohja (johonka valettu metallinen laakerointikappale oli kiinnitetty) kiinnitettiin pitkillä pulteilla neljästä nurkastaan tuon lastulevyn alle parin sentin päähän. Pultit on ensin pujotettu lastulevystä ja kiinnitetty muttereilla lastulevyn alle, sitten pultteihin kierrettiin nyloc-mutterit ja vanerinen montun pohja ja lopuksi siipimutterit. Siipimuttereita löysäämällä ja Nyloc-muttereita säätämällä ja siipimutterit uudelleen kiristämällä etsittiin montun pohjalle oikea korkeus ja levy asetettiin vaakasuoraan moduulin kanssa.
Montun pohjalla on ns. kehäkiso, jonka varassa esikuvan kääntölavan päissä olevat pyörät ovat kulkeneet. Tässä mallissa ei ole noita pyöriä ollenkaan, vaan kehäkisoa on käytetty sähkön johtamiseen kääntölavalle. Ajovirta otetaan kehäkiskosta jousitetulla moottoripyörän laturin hiilellä, joka on sovitettu eristetylle alustalle U-palkin alle. Toinen napa tulee laakeroinnin kautta.
Kääntölavan kansi on piirilevyä, jonka kuparipinta jyrsittiin halki jotta kiskot voidaan juottaa piirilevyn pintaan.Messinkisestä H-palkista tehty tukiristikko juotettiin piirilevyyn, ja eristettiin toisesta puolestaan hiomalla Dremelillä piirilevyn kupoarifolio kiinnityspisteieden ympäriltä.
Kiskot juotettiin piirilevyn päälle. Ensin kiskot kiinnitettiin vain kevyesti päistään juottamalla, ja montun reunalle tuotiin raide mahdollismman tarkasti oikeaan kohtaan, ja kiskon päitä siirrettiin sekä kääntölavassa että montun reunalla ja välillä lavaa pyöräytettiin 180 astetta ympäri ja taas säädettiin. Pikkuhiljaa kiskojen oikea asema piirilevyllä ja montun reunalla löytyi. Näin kiskot saatiin lavaan oikeaan paikkaan ja loput kääntölavan montun reunalle tulevat raiteet kohdistettiin sitten lavan kiskojen avulla. Piirilevystä tehtiin kivijäljitelmät montun reunalle, ja tulevat kiskot juotettiin näihin piirilevyn palasiin.
Kääntölavan laudoitus on liimattu mustaksi maalatun piirilevyn päälle pikaliimalla. Lavan sivuilla on messinkipellistä liimatut kyljet, jotka peittävät alumiiniprofiilin, ja sen että alumiiniprofiili on pari milliä sivussa. Lisäkoristeet on liimattu, ja osin juotettu.
Ratapöydän alla lakeriden läpi menevän akselin alapäässä oli reikä ja kierteet valmiina, joten alumiinista leikattu käyttökiekko saatiin helposti kiinni akselin päähän. Lavaa liikuttaa Bebekin vaihteistomoottori, jonka päähän on kumiläpiviennistä ja kahdesta kupu-uppokantaruuvin aluslevystä ja parista muttereista kokoonpantu kumipyörä. Jos pöydästä tekisi käsikäyttöisen voisi moottorin paikalla olla käsikampi radan reunaan.
Moottorin ohjaus on tehty analogisella elektroniikalla. Alumiinisen, pystyakselin alapäähän kiinnitetyn levyn kehälle on porattu reikiä ja niihin on ruuvi-mutteri-yhsdistelmällä kiinnitetty muovisia "sormia". Reikien paikka on sellainen että moottorin kumirissa ei osu ruuvien kohdalle. Muoviset sormet menevät infrapunaledin ja infrapuna-anturin välistä. Infrapuna-anturi ohjaa moottoria niin että jos anturi ei näe infrapunalediä moottori pyörii toiseen suuntaan ja jos se näkee infrapunaledin se pyörii toiseen suuntaan. Trimmerivastuksilla on ohjauksen tehty sellainen alue, että tietyssä tilanteessa, jolloin infrapunaledin valo juuri ja juuri osuu vastaanottimeen, kääntölavan moottori pysähtyy. Moottoria ohjataan siten että moottori käynnistyy asteittain kiihtyen. Kun nyt kääntölava on sellaisessa asennossa, että muovinen sormi estää näkyvyyden, käy moottori esimerkiksi oikealle. Kun näköyhteys ledin ja vastaanottimen välille syntyy, moottori pysähtyy välittömästi. Moottori ei kuitenkaan pysähdy "kuin seinään", vaan lava kääntyy yleensä hieman liian pitkälle, jolloin näköyhteys ledin ja vastaanottimen välille syntyy. Nyt moottoria aletaan hiljaksiin kiihdyttää vasemmalle, kunnes tullaan taas siille "harmaalle alueelle" jossa moottorin pitäisi pysähtyä. Koska moottori ei ehdi kiihtyä täyteen nopeuteensa se pysähtyy nyt lähemmäs sitä harmaata aluetta -- se ei mene niin paljoa "pitkäksi". Taas moottori kiihdyttää oikealle, ja muutaman kerran jälkeen lava pysähtyy juuri oikeaan paikkaan. Jos lavaa halutaan ajaa nyt seuraavan raiteen kohdalle, voidaan valovastaanotinta "huijata" painikkelilla, ja lava lähtee liikkeelle haluttuun suuntaan. Kun lava on lähes seuraavan raiteen kohdalla päästetään sormi napilta ja lava hakee taas oikean asennon. Yleensä lava löytää oikean asennon parin, kolmen "korjausliikkeen" jälkeen. Kytkentä on alkeellinen, ja siinä on neljä trimmerivastusta joiden säätäminen on varsin tuskallista. Parempi kytkentä on tarkoitus tehdä, mutta koska tuo nykyinenkin saatiin viritettyä toimintaan ei ole ollut kiinnostusta kehittää systeemiä edelleen.
Alumiinilevyssä on myös yksi tappi ja tapissa pieni kuulalakeri ja levyn alle on kiinnitetty mikrokytkin jota tappi painaa kuulalaakerin välityksellä puolen kierroksen ajan. Mikrokytkin kääntää releen avulla kääntölavan kiskojen napaisuuden.
Montun pystysuorat reunakivet on balsaa ja kiinnitetty moduulin kansilevyyn, ja montun kivireuna menee kehäkiskon korotusrenkaan taakse ja jää pari milliä vajaaksi jotta vaneerilevyn asemaa voidaan korjata, jos tarvetta on.
Tässä pääpiirteittäin kääntölavan "sielunelämä". Projekti ei ole tarkoitettu tarkasti kopioitavaksi, sillä siinä on käytetty sellaisia osia joita ei joka pojan työkalupakista aina löydy. Ehkä tästä voi hakea ideoita ja innoitusta omalle projektille.
Yllättävän samankaltainen kääntölavan ohjaumekanismi on paljon ennen omaamme kehitetty yhdysvalloissa MIT Model Railroad Club
10220 kävijää/visitors
© 1996-2026 Tapiola Parish Model Railway Club / Tapiolan seurakunnan pienoisrautatiekerho, Viimeksi päivitetty / last modified (none). Created with Notepad.
Text, drawings and photos are protected by copyright laws. Technical solutions, methods and source code are public domain only for non commercial purpose. All development has been carried out during our free time, mainly funded from our own pocket and with non selfish goals, so the use of this material for profitable use (including construction for a friend aginst a fee) is forbidden without written permit from the club. The pages contain errors, so, if you use the data given, you do so at your own risk and responsibility. If you further develop material found on these pages you must put it on display without fee e.g. to a freely available web page. We expect a note about this also.
Pages tested with W3C validator -- didn't look good ;)
[YHTEYSTIEDOT] Älä lähetä sähköpostia!
Tekstit, kuvat ja piirokset ovat tekijänoikeuslain suojaamia. Tekniset ratkaisut, menetelmät ja lähdekoodit ovat vapaasti kopioitavissa ja hyödynnettävissä ei-kaupallisissa tarkoituksissa. Kaikki kehitystyö on tehty vapaa-aikana ja pääosin henkilökohtaisilla varoilla eikä hyötymistarkoituksessa, siksi materiaalin käyttö hyötymistarkoituksiin (sisältäen kaverille rahasta rakentamisen!) on kielletty ilman kerhon kirjallista lupaa! Sivuilla esiintyy virheitä. Jos käytät sivujen tietoja hyväksesi, teet sen täysin omalla vastuullasi. Mikäli kehität sivuilla esiettyjä ajatuksia kytkentäkaavioita tai koodia edelleen, on sinun asetettava se maksutta kaikkien saataville esimerkiksi Internetiin. Odotamme vastavuoroisesti tietoa suoritetusta edelleenkehitystyöstä.
Sivut testattu W3C validatorilla -- ei näyttänyt hyvältä ;)